Researchers at City University Hong Kong (City U) have developed a 1mm-long robot with caterpillar-like legs, which they have designed to deliver drugs inside the body. The robot can carry a therapeutic payload of more than 100 times its own weight and has been made rugged and highly manoeuvrable to carry drugs to areas like the stomach where they are needed. The robot will be used as a prototype as the team works towards creating a fully biodegradable robot that will naturally decompose after delivering drugs.
Dr Shen Yajing, assistant professor in CityU’s Department of Biomedical Engineering (BME) led the research along with Professor Wang Zuankai, from CityU’s Department of Mechanical Engineering (MNE), who conceived the research idea and initiated the collaboration among the researchers.
Go deeper with GlobalData

The co-first authors of the paper are Haojian Lu, a PhD student from CityU’s BME, and Dr Zhang Mei from CityU’s MNE. The other co-authors include Yang Yuanyuan, PhD student from BME, and Professor Huang Qiang and Professor Toshio Fukuda from the Beijing Institute of Technology.
Lu Haojian explains how the device works, the reasoning behind the caterpillar concept and what is next for the unique device.
Charlotte Edwards: What is the caterpillar robot made of?
Haojian Lu: This robot was fabricated using a modified magnetic particle-assisted moulding approach. Briefly, we first prepared a mixture with Polydimethylsiloxane (PDMS) pre-polymer, hexane, and magnetic particles with a diameter of 6-10 μm. Then, the mixture was well-distributed on the polystyrene plate through spin coating. After that, a permanent magnet was applied underneath the plate to form ordered micro tapered feet. After the formation of the legs on the polystyrene plate, the plate was then placed in a convection oven for thermal curing for one hour at 80°C to solidify the PDMS.
How well do you really know your competitors?
Access the most comprehensive Company Profiles on the market, powered by GlobalData. Save hours of research. Gain competitive edge.

Thank you!
Your download email will arrive shortly
Not ready to buy yet? Download a free sample
We are confident about the unique quality of our Company Profiles. However, we want you to make the most beneficial decision for your business, so we offer a free sample that you can download by submitting the below form
By GlobalDataCE: How does the caterpillar robot work?
HL: When an external magnetic field is applied, the soft body will locate in a magnetic field and will experience both a torque and a force. Both the magnetic torque and the force the millirobot experiences are proportional to the magnetic field strength. The magnetic torque serves to align the millirobot with the magnetisation field, which raises the body; whereas the magnetic force serves as a driving force and drags the millirobot to move in the local maximum magnetic field.
The robot proposed in our work will deform under the magnetic field. Based on the manipulation system for robot actuation, which is composed of three stepper motors and assembled mutually perpendicular, the magnetic field can be controlled precisely during the accurate permanent magnet motion. Therefore, the proposed robot would move forward like an animal based on the precise control of the robot deformation.
CE: Why does the robot have a caterpillar-like design?
HL: This concept is inspired by nature as legs and feet are commonly found in many living animals, including both land animals and ocean animals after billions of years’ evolution. Legs can lift the animal’s body from the ground in a manner which leads to a decreased amount of body friction on the ground, higher degrees of freedom in locomotion, less energy cost, and enhanced obstacle crossing ability.
Thus, legged animals usually demonstrate a great adaptability to travel across complex terrain, and can probably access virtually 100% of earth’s land surface. Dr Shen found that multiple legs could lift the robot’s body from ground, improve the adaptiveness to harsh environments, and increase the obstacle crossing ability. Therefore, we made a robot with multiple legs and a soft design.
CE: Do you think robots are the future of drug delivery?
HL: It could be one solution for drug delivery in the future owing to its environment adaptiveness and excellent motion ability. Our proposed robot yields new fascinating features which are otherwise impossible in the soft-bodied robot, such as, superior adaptivity to various harsh environments like smooth, rough and wet slippery surfaces. Other features include an ultrafast locomotion speed of up to 40 times limb length in one second, ultra-strong carrying capacity of up to 100 times its own weight, excellent obstacle crossing ability, ability to stand up at a 90° angle and across obstacles up to ten times its body height. The caterpillar robot also has several advantages in locomotion including human walking like locomotion, robust holding and climbing ability, and smooth transformations between locomotion.
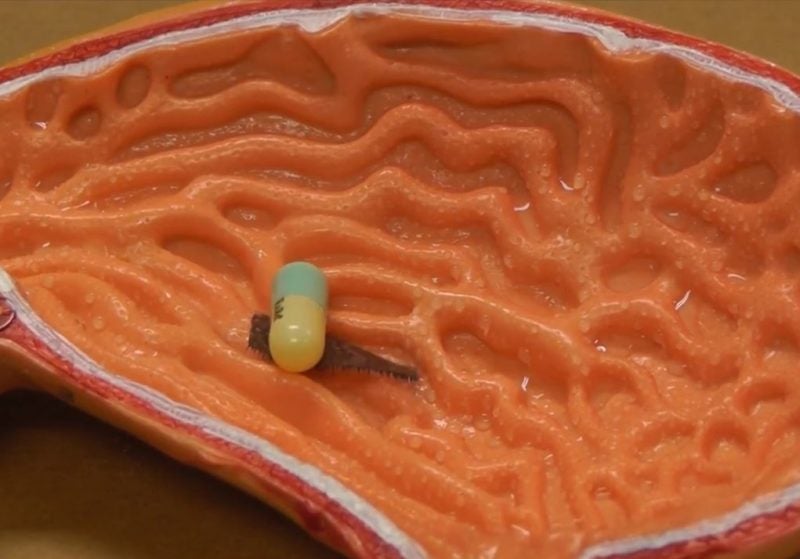
To further exhibit the potential applications in in-vivo biomedical environment, we demonstrated the locomotion of our robot on a human stomach-like structure with an isolated, wet surface. We chose the complex stomach internal structure with 1.5-6.8 mm in depth and 2.4-6.2 mm in width which is between two and ten orders of magnitude larger than the leg length. To demonstrate the carrying ability, we adhered a medical tablet (~91.4 mg) on the robot body, which is twice as heavy as its own weight. As the result shows, our robot can move 32mm in 50 seconds at such harsh in-vivo simulated environment by untethered control.
CE: What are the future plans for this device and the research team?
HL: In the future, we will design the robot with biodegradable material, and try putting drugs inside the robot body. Such robot design could be adopted for in-vivo drug delivery and would be degradable inside the human body, which makes it more acceptable for drug delivery.
Moreover, the sensing system of the soft robot will be re-designed specifically to appeal to the untethered and unknown environment inside human body, so that areas with lesions can be detected and the target therapy can be realised based on our proposed multi-legged soft robot.

