
US researchers from Harvard University’s John Paulson School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering have developed a small, hybrid rigid-soft robotic arm for endoscopes.
Based on a bio-inspired approach that combines pop-up fabrication with soft robotics, the arm is designed to stay flat on the endoscope and pop up after entering the target surgical site.
Go deeper with GlobalData

Discover B2B Marketing That Performs
Combine business intelligence and editorial excellence to reach engaged professionals across 36 leading media platforms.
Soft robots are considered suitable for surgical applications as they will not accidentally puncture or tear the body tissue.
The hybrid model features a rigid skeleton that is surrounded by soft materials such as actuators that are integrated into the pop-up fabrication system.
SEAS and Wyss Institute postdoctoral fellow Sheila Russo said: “We found that, by integrating soft fluidic microactuators into the rigid pop-up structures, we could create soft pop-up mechanisms that increased the performance of the actuators in terms of the force output and the predictability and controllability of the motion.
“The idea behind this technology is basically to obtain the best of both worlds by combining soft robotic technologies with origami-inspired rigid structures.”
Powered by water, the soft actuators used in the robotic arm are connected to the rigid components through an irreversible chemical bond.
The researchers incorporated capacitive sensing into the arm to measure forces applied to the tissue and to sense the direction and movement of the device. They also included a suction cup to ensure safe tissue interaction.
The arm has already been tested ex-vivo for a simulated complex endoscopic procedure, and the team intends to proceed for in-vivo evaluation.
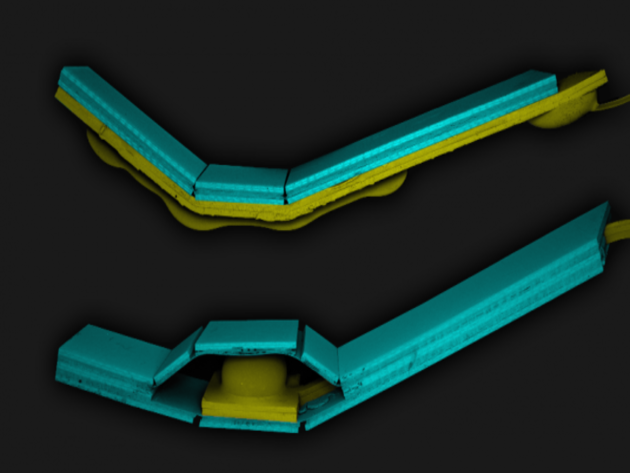
Image: SEM images of the hybrid soft pop-up actuators. Photo: courtesy of the Wyss Institute at Harvard University, Cambridge, Massachusetts, US.
