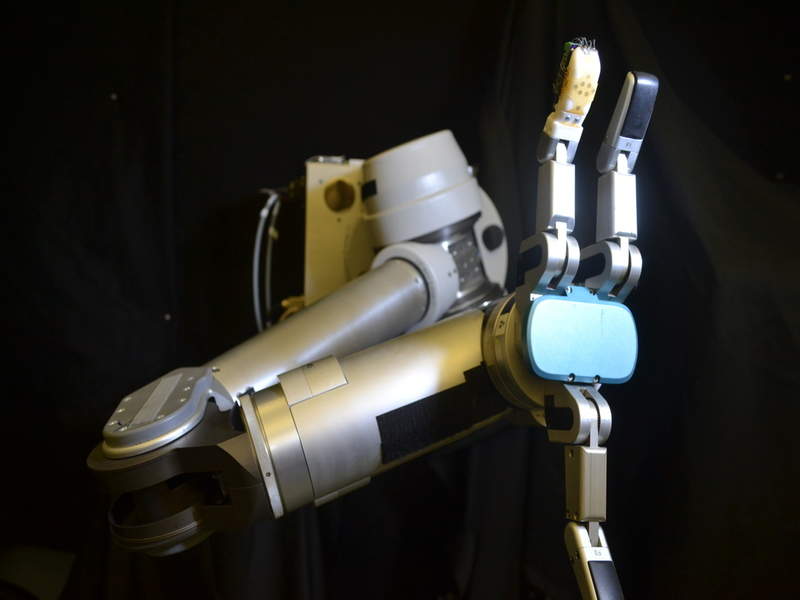
Researchers at the University of Washington (UW) and University of California (UCLA) in the US have developed a new flexible sensor skin to allow robots or prosthetics to sense vibrations and shear forces.
The bio-inspired skin can be stretched over any part of the device’s body to provide accurate information required for successful grasping and manipulation of objects, according to the researchers.
Go deeper with GlobalData

Discover B2B Marketing That Performs
Combine business intelligence and editorial excellence to reach engaged professionals across 36 leading media platforms.
Similar to a human finger that experiences tension and compression, the skin precisely and sensitively measures tactile information and is expected to improve performing ability of robots with application in surgical or industrial sectors.
UW mechanical engineering and chemical engineering professor Jonathan Posner said: “If a robot is going to dismantle an improvised explosive device, it needs to know whether its hand is sliding along a wire or pulling on it.
“To hold onto a medical instrument, it needs to know if the object is slipping. This all requires the ability to sense shear force, which no other sensor skin has been able to do well.”
The new design is expected to address the limitations with existing instrumented fingers or sensor skin, which focus on individual modalities alone, while dexterous manipulation needs a multimodal approach.
UCLA mechanical and aerospace engineering associate professor Veronica Santos said: “The fact that our latest skin prototype incorporates all three modalities creates many new possibilities for machine learning-based approaches for advancing robot capabilities.”
Manufactured at the UW Washington Nanofabrication Facility, the new sensor skin is made from the silicone rubber embedded with tiny serpentine channels that comprise electrically conductive liquid metal, which does not crack or fatigue upon stretching.
After testing, the researchers found that the flexible sensor skin possesses high-accuracy and sensitivity for light-touch applications such as handling objects, picking up packages and interaction with a phone.
